In order to continue our discussion regarding polygons, points and other computational geometry code in MATLAB, we need to explain a few concepts. This includes how we will describe points, vectors and lines.
A point is used to describe a location in Euclidean space, and in MATLAB we will use a one-dimensional array with n elements, with each element providing the location along each of the n dimensions. Such an array to describe a point in 3D space (at x = 1, y = 2, z = 3) might be as simple as:
p1 = [1,2,3]
Vectors, as opposed to points, provide both a magnitude and a direction. Unfortunately, in MATLAB the way to represent a vector is exactly the same as a point. Thus a vector a = <1,2,3> would also be written the same as p1 above, but would indicate that we have a vector point 1 unit in the x dimension, 2 units along y, and 3 units along z. In order to reduce confusion, ensure you properly comment your code and name your variables.
Finally, to describe a line, we will use two different methods. First, in 2-D space we can utilize the slope-intercept method. If given two points in Euclidean space, a line (segment) can be defined. Here is some sample code to generate the slope and intercept of the line. First lets initialize our function ‘getPointSlope’, and run checks to ensure proper definitions for the two points, ‘pointA’ and ‘pointB’.
function [slope, intercept] = getPointSlope(pointA, pointB, plotResults)
% Works in 2D space line defined by slope of the line (m) and the
% y-intercept (b), with the equation y = mx + b
if nargin < 3
plotResults = false;
end
% error-check
if numel(pointA) ~=2 || numel(pointB) ~= 2
error('The two points are not properly defined in 2-D space');
end
Next, there is a special condition, specifically vertical lines, where the slope-intercept method can break down. We need to check for this condition:
% Special condition when vertical line. Will be the equation x = xA = xB:
if pointA(1) == pointB(1)
slope = inf;
intercept = pointA(1);
warning(['Points provided define the line x = ', num2str(pointA(1))]);
return
end
Note: In this condition, the output argument intercept is set to the x value, not the y-intercept. The user needs to ensure that if slope = inf, that the equation is x = intercept, rather than y = mx+b.
Next, we solve for the slope and intercept:
% Calculate the slope:
slope = (pointB(2) - pointA(2))/(pointB(1) - pointA(1));
% Solve for y-intercept
intercept = pointA(2) - slope*pointA(1);
Finally, if wanted, you can plot the results:
% plot the results
if plotResults
figure; hold on;
% plot the provided points
plot([pointA(1) pointB(1)], [pointA(2) pointB(2)], 'bo');
% calculate line y-values using mx+b equation we have solved for
x0 = min([pointA(1) pointB(1)]) - 1;
x1 = max([pointA(1) pointB(1)]) + 1;
y0 = slope * x0 + intercept;
y1 = slope * x1 + intercept;
% plot the line
plot([x0 x1], [y0 y1], 'r-');
end
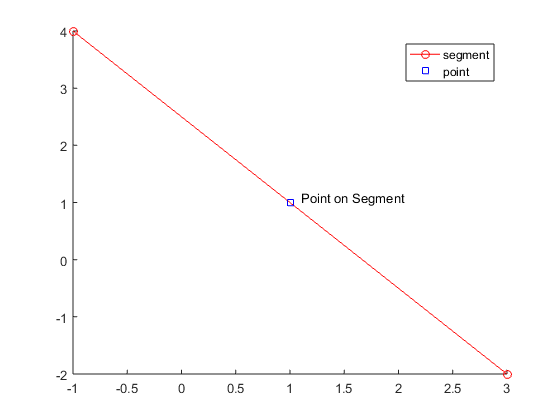
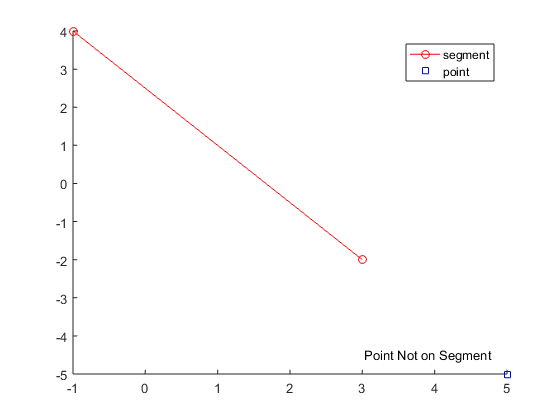
Here are a couple example results for two lines, the first one vertical (two points at [1,1] and [1,3]) and the second one through [1,1] and [2,3]. As you can see the results of the second line provide a slope (m) = 2 and a y-intercept (b) = -1: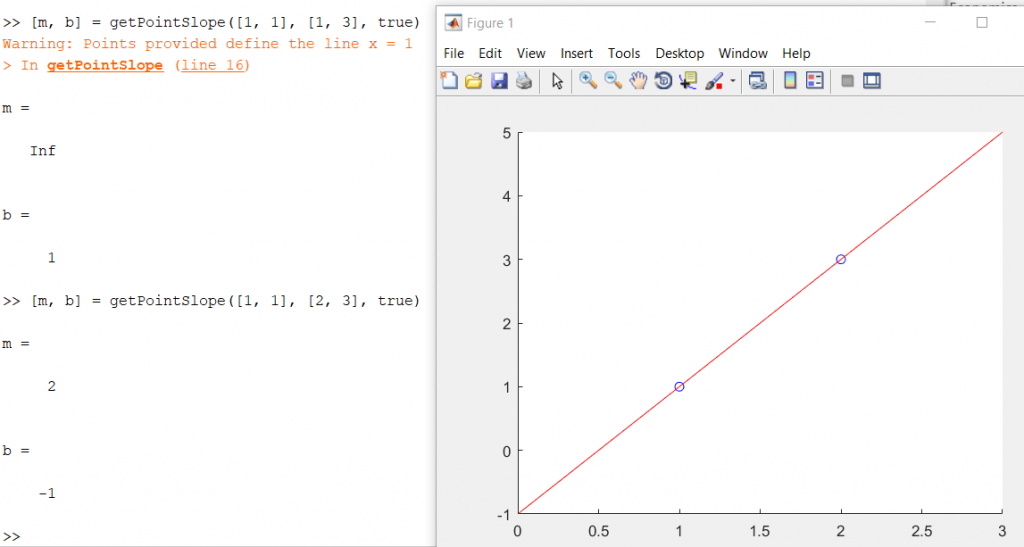
While this slope-intercept form of a line is useful, and something you probably remember from grade school, another method we will use extensively is the paramaterized form. In this form, each dimension is represented with the parametric equation x = x0 + at, y = y+bt, etc. Here is some sample code that can quickly give you the values for a,b,c, etc based on the two points provided for the line:
function a = parameterizeLine(pointA, pointB)
% parameterized lines will have the form:
% x = x0 + a*t;
% y = y0 + b*t;
% z = z0 + c*t;
% etc
% where the output a to this function will be a vector of [a,b,c,...]
% [a,b,c] is the slope of the line.
% error check
if numel(pointA) ~= numel(pointB)
error('points are not same dimensionality');
end
numDim = numel(pointA);
if numDim == 1
error('1-D space');
end
% initialize a and solve
a = zeros(1, numDim);
for k = 1:numDim
a(k) = pointB(k) - pointA(k);
end
We will be mostly using the parametric equation method for further posts, with t ranging from 0 to 1, but if you have any thoughts or comments, please let us know!